聊聊量子搜索算法(Grover算法) - 2
Ping Zhou, 2021-01-26
在上文中我们讨论了量子搜索算法的实现,其中的关键是用G变换多次迭代,逐渐逼近答案,最后在输出端测量得到结果。 那么为什么多次重复G变换能达到这样的效果呢?Grover算法的查询次数是\(O(\sqrt{N})\),这个\(O(\sqrt{N})\)又是怎么来的呢?本文接着上一篇继续讨论这些问题。
Grover算法的图像化
要理解Grover算法的原理,最直观的方法是把它图像化,从几何意义来理解。
回顾一下上文的量子搜索电路:
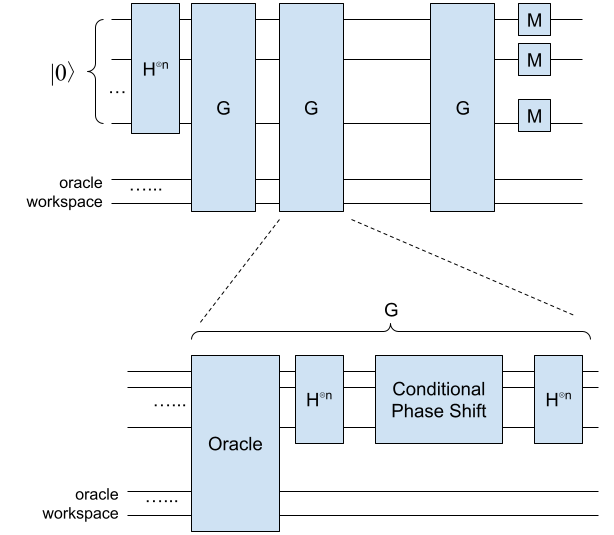
我们的电路有n个搜索用的量子比特,可以表示\(N=2^{n}\)个基态,对应搜索空间0到N-1的编号。为方便讨论,我们用\(|0\rangle, |1\rangle, |2\rangle, |3\rangle, \dots, |N-1\rangle\)来表示这些基态。
假定在这N个编号中,有M个是符合条件的答案。在上文的讨论中我们假定M=1,也就是只有1个符合条件的编号,这里我们把它扩展到更普遍的情况,M可以大于1,也就是可以有多个符合条件的答案。因此不符合条件(也就是让判断函数f返回0)的编号有N-M个。
我们把所有 不符合条件 的N-M个基态叠加在一起,组成一个叠加态的状态向量,把它记作\(|\alpha\rangle\)。
类似的,把所有 符合条件 的M个状态叠加在一起,组成一个状态向量,把它记作\(|\beta\rangle\)。
显然,上面这两个向量\(|\alpha\rangle\),\(|\beta\rangle\)是正交的。因此我们可以用它们作轴,张成一个二维平面。
然后我们在这个平面里,考察前面G变换公式里的\(|\psi\rangle\),这是一个所有基态无差别叠加的状态,那么这个\(|\psi\rangle\)在这个二维平面里,可以写成:
\begin{matrix} |\psi\rangle=\sqrt{\frac{N-M}{N}}|\alpha\rangle + \sqrt{\frac{M}{N}}|\beta\rangle \end{matrix}这个\(|\psi\rangle\)向量,和\(|\alpha\rangle\)轴之间的夹角,我们记作\(\frac{\theta}{2}\),如下图所示:
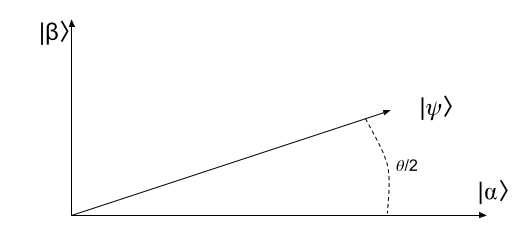
根据简单的三角函数,我们很容易得到:
\begin{matrix} \cos\frac{\theta}{2} = \sqrt{\frac{N-M}{N}} && \sin\frac{\theta}{2} = \sqrt{\frac{M}{N}} \end{matrix}继续分析G变换。从上文我们知道,G变换可以写成:
\[ G=(2|\psi\rangle \langle\psi|-I)O \]
我们先从O(Oracle)变换看起。O变换干了什么呢?它是把输入的状态\(|x\rangle\)变成\((-1)^{f(x)} |x\rangle\)。如果f(x)=1,那么它就给输出加上一个-1的相位,否则不变。那么这个操作在二维平面图中,实际上就是把输入的向量对\(|\alpha\rangle\)轴做了一个 反射 。
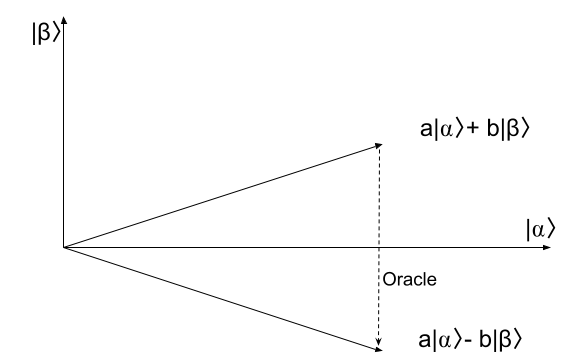
所以,Oracle变换的作用,就是把输入向量对\(|\alpha\rangle\)轴做一个反射。
然后继续看G变换后面的部分,\(2|\psi\rangle\langle\psi|-I\),其中\(|\psi\rangle\)是所有基态的无差别叠加态。这个变换的效果是什么呢?我们来简单推导一下:
\begin{matrix} |\psi\rangle\langle\psi|= \begin{bmatrix} \frac{1}{\sqrt{N}} \\ \frac{1}{\sqrt{N}} \\ \vdots \\ \frac{1}{\sqrt{N}} \end{bmatrix} \begin{bmatrix} \frac{1}{\sqrt{N}} && \frac{1}{\sqrt{N}} && \dots && \frac{1}{\sqrt{N}} \end{bmatrix} \\ = \begin{bmatrix} \frac{1}{N} && \frac{1}{N} && \dots && \frac{1}{N} \\ \vdots && && && \vdots \\ \frac{1}{N} && \frac{1}{N} && \dots && \frac{1}{N} \end{bmatrix} \end{matrix}因此:
\begin{matrix} 2|\psi\rangle\langle\psi|-I = \begin{bmatrix} (\frac{2}{N}-1) && \frac{2}{N} && \frac{2}{N} && \dots && \frac{2}{N} \\ \frac{2}{N} && (\frac{2}{N}-1) && \frac{2}{N} && \dots && \frac{2}{N} \\ \vdots && && && && \vdots \\ \frac{2}{N} && \frac{2}{N} && \dots && \dots && (\frac{2}{N}-1) \end{bmatrix} \end{matrix}这个矩阵作用于任意向量会起到什么效果呢?假设我们有个向量\(\sum_{k=0}^{N-1}\alpha_k|k\rangle\),把这个矩阵作用于它:
\begin{matrix} \begin{bmatrix} \frac{2}{N}-1 && \frac{2}{N} && \frac{2}{N} && \dots && \frac{2}{N} \\ \frac{2}{N} && \frac{2}{N}-1 && \frac{2}{N} && \dots && \frac{2}{N} \\ \vdots && && && && \vdots \\ \frac{2}{N} && \frac{2}{N} && \dots && \dots && \frac{2}{N}-1 \end{bmatrix} \begin{bmatrix} \alpha_0 \\ \alpha_1 \\ \vdots \\ \alpha_{N-1} \end{bmatrix} \\ = \begin{bmatrix} -\alpha_0+2\langle\alpha\rangle \\ -\alpha_1+2\langle\alpha\rangle \\ \vdots \\ -\alpha_{N-1}+2\langle\alpha\rangle \end{bmatrix} = \begin{bmatrix} -\alpha_0 \\ -\alpha_1 \\ \vdots \\ -\alpha_{N-1} \end{bmatrix} + \begin{bmatrix} 2\langle\alpha\rangle \\ 2\langle\alpha\rangle \\ \vdots \\ 2\langle\alpha\rangle \end{bmatrix} \end{matrix}其中的\(\langle\alpha\rangle\)是所有分量\(\alpha_k\)的平均值:\(\langle\alpha\rangle=\frac{1}{N}\sum_{k=0}^{N-1}\alpha_k\)
上面这个式子,加号左边就是原向量乘-1,而加号右边的向量,所有分量都相同,都是\(2\langle\alpha\rangle\),归一化后就是无差别叠加态\(|\psi\rangle\)。两者相加,得到的是什么?看下面的图就可以直观的理解了:

所以,\(2|\psi\rangle\langle\psi|-I\)作用在任意向量上,其实就是把输入向量对\(|\psi\rangle\)做 反射 !
总结一下,G变换实际上就是连续两个反射操作:
- 首先对\(|\alpha\rangle\)轴做反射,即其中的Oracle变换
- 然后对\(|\psi\rangle\)做反射,即其中的\(2|\psi\rangle\langle\psi|-I\)
连续两步反射操作合在一起,其实就是把输入的向量进行了 旋转 。那么这个旋转角度是多少呢?我们在图里画一下就能明白了:
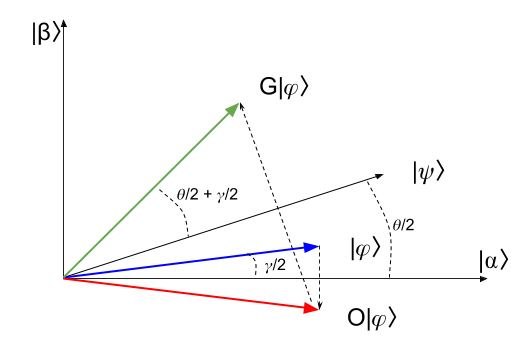
假设我们有个输入向量\(|\phi\rangle\),它和\(|\alpha\rangle\)轴之间的夹角是\(\gamma/2\)。经过G变换的两次反射后,它和\(|\alpha\rangle\)轴的夹角变成了\(\theta/2+\theta/2+\gamma/2 = \theta+\gamma/2\)。也就是说,输入向量经过一次G变换后,朝着\(|\beta\rangle\)轴旋转了\(\theta\)。而\(|\beta\rangle\)轴意味着什么呢?它是所有 正确答案 的叠加态啊!如果系统的状态转到非常接近\(|\beta\rangle\)轴,测量就能得到正确答案!
所以, 我们每做一次G变换,就让系统的状态朝着\(|\beta\rangle\)轴旋转了\(\theta\) 。那么我们把这个过程重复多次,让系统非常接近\(|\beta\rangle\)轴,然后进行测量,就能以非常高的概率得到正确答案!
Grover算法的性能分析
Grover算法需要试多少次能找到答案呢?这个问题实际上就是问,从初始状态\(|\psi\rangle\)出发,需要旋转多少次能接近\(|\beta\rangle\)轴?我们来做一个简要的分析。
前面分析过,G变换就是将系统状态朝\(|\beta\rangle\)旋转\(\theta\)。因此G可以写成这样的矩阵:
\begin{bmatrix} \cos\theta && -\sin\theta \\ \sin\theta && cos\theta \end{bmatrix}- 一开始系统处于初始状态\(|\psi\rangle\),和\(|\alpha\rangle\)轴的夹角是\(\theta/2\)。
- 每次G变换,将状态向量朝着\(|\beta\rangle\)旋转\(\theta\)。
- 经过k次G变换后,系统状态向量和\(|\alpha\rangle\)的夹角是\(\frac{2k+1}{2}\theta\): \[ G^k|\psi\rangle = \cos(\frac{2k+1}{2}\theta)|\alpha\rangle + \sin(\frac{2k+1}{2}\theta)|\beta\rangle \]
我们的目标是尽可能接近\(|\beta\rangle\)轴,因此需要\(\sin(\frac{2k+1}{2}\theta)\)尽可能接近1,也就是\(\frac{2k+1}{2}\theta\)尽可能接近\(\pi/2\)。因此: \[ \frac{2k+1}{2}\theta \approx \frac{\pi}{2} \]
\[ k \approx (\frac{\pi}{2\theta} - \frac{1}{2}) \]
又因为k是整数,所以有\(k=round(\frac{\pi}{2\theta} - \frac{1}{2})\)。
我们知道 \[ \sin\frac{\theta}{2} = \sqrt{\frac{M}{N}} \]
同时假设搜索空间很大,N远大于M,我们可以做这样的近似: \[ \sin\frac{\theta}{2} \approx \frac{\theta}{2} \]
连起来我们就有这样的近似: \[ \frac{\theta}{2} \approx \sqrt{\frac{M}{N}} \]
把这个近似代入到前面k的式子里: \[ k=round(\frac{\pi}{2\theta} - \frac{1}{2}) \approx round(\frac{\pi}{4}\sqrt{\frac{N}{M}} - \frac{1}{2}) \]
可见需要旋转的次数k是\(O(\sqrt{\frac{N}{M}})\)。当M=1,也就是N个元素里只有1个正确答案的时候,k就是\(O(\sqrt{N})\)。所以,量子搜索算法相对于经典计算机,是\(O(N)\)到\(O(\sqrt{N})\)的加速。
特殊情况讨论:如果正确答案超过一半呢?
想象一下,如果N个元素中有超过一半的正确答案,\(M>N/2\),会发生什么?
在这种情况下,Grover算法的性能反而会变差!为什么呢?其实用刚才的几何图像想象一下就明白了,因为每次旋转的角度太多了,转过头了!
这种情况有两种解决办法:
- 干脆不用量子搜索了,直接随机抽;
- 把搜索空间扩大一倍,也就是N变成2N,这样正确答案不就少于一半了?实现方法也不难,给电路增加一个量子比特,规定如果它是\(|1\rangle\),f(x)就返回0,否则就看其他的n位。这样就可以继续用Grover算法来搜索,这时旋转次数就变成了\(O(\sqrt{\frac{2N}{M}})\),还是\(O(\sqrt{\frac{N}{M}})\)级别。