看懂量子计算机的威力 - 从Deutsch问题说起
Ping Zhou, 2020-08-01
简介
量子计算是现在的热门话题之一,很多人可能听说过诸如“量子霸权”之类的名词,那么量子计算为什么会被认为有可能比经典计算机更快呢?这里就从最简单的Deutsch问题入手,解析量子计算的一些基本思路,相信看完后你会对量子计算的潜力有更直观的认识。
一些术语和基础
首先要先解释一下后面讨论中用到的一些术语和基础知识。
量子比特(Qubit) :我们知道,一个经典比特(bit)只能表示两种状态(0或者1)。而一个量子比特除了 \(|0\rangle\) 和 \(|1\rangle\) 之外,还可以处于一种叫相干态(superposition)的状态,即“同时”处于 \(|0\rangle\) 和 \(|1\rangle\) 两种状态。这可以用 \(\alpha|0\rangle + \beta|1\rang\) 来表示( \(\alpha\) 和 \(\beta\) 都是复数)。一个常见的例子是 \(\frac{1}{\sqrt{2}}(|0\rangle+|1\rangle)\) ,测量得到0和1的概率分别是50%。
量子计算电路里常见的几种门(变换):
- I:Identity变换,简单说就是啥也不变,输入啥输出也是啥。
- H: Hadamard门,在这个例子里主要作用是制备相干态,因为H门可以把 \(|0\rangle\) 变成 \(\frac{1}{\sqrt{2}}(|0\rangle+|1\rangle)\) ,而把 \(|1\rangle\) 变成 \(\frac{1}{\sqrt{2}}(|0\rangle-|1\rangle)\) 。另外H变换还有个特性,就是HH=I,两个H变换互相抵消。
- Z:输入 \(|x\rangle\) ,输出 \((-1)^x|x\rangle\) ,例如输入 \(|0\rangle\) ,输出 \(|0\rangle\) ,而输入是 \(|1\rangle\) 的话,输出是 \(-|1\rangle\) 。
- X:简单说就是将输入取反,输入 \(|0\rangle\) 的话,输出 \(|1\rangle\) ,而输入 \(|1\rangle\) ,则输出 \(|0\rangle\) 。
另外,还有两个特性后面会用到:
\(HZH=X\) \(HIH=I\)
好了,需要了解的基础知识就这么些,接下来我们来看量子计算是如何加速Deutsch问题的。
问题的提出:如何判断单比特函数的性质?
假设我们有个函数f,输入和输出都是1个比特: \(y=f(x)\) :
因为输入和输出都只有1个比特,这个函数无非就是这4种可能:
- \(f(x)=0\) ,即不管x是0还是1,f(x)总是0,我们记作 \(f_0\)
- \(f(x)=1\) ,即不管x是0还是1,f(x)总是1,我们记作 \(f_1\)
- \(f(x)=x\) ,即f(x)输出比特和输入比特相同,我们记作 \(f_x\)
- \(f(x) = \bar{x}\) ,即f(x)输出比特与输入比特相反,我们记作 \(f_\bar{x}\)
前两种可能,我们称为“常量”函数(constant),因为他们的输出是常量;而后两种我们称为“平衡”函数(balanced),因为他们所有可能的输出中间,0和1各占一半。
所谓的Deutsch问题,实际上是问:假如f(x)对我们而言是一个黑盒,也就是说我们不知道f(x)里面是怎么运作的,如何判断它是“常量”还是“平衡”的呢?
你也许会说,很简单啊,我们给f(x)喂一点输入,然后观察它的输出就行了啊,对不对?这个“喂输入,观察输出”的过程,我们称为对f(x)的“ 查询 ”。
那么下一个问题, 我们需要对f(x)做几次“查询”,才能知道它到底是“常量”还是“平衡”呢?
稍微想一下就可以知道,1次查询是不够的。举个例子,我们给f(x)输入0,得到输出0,我们能够只根据这个结果判断f(x)的性质吗?显然不行!因为f(x)既有可能是常量( \(f_0\) ),也有可能是平衡的( \(f_x\) ),两者都能满足“输入0,输出0”。
所以,在经典世界里,我们需要对f(x)做2次查询,才能判断它是常量还是平衡。
那么有没有更快的办法,仅用1次查询就能判断出f(x)的性质呢?用量子计算可以做到!
量子计算加速:Deutsch-Jozsa算法
在量子计算里,所有的变换都必须是 可逆 的,也就是“从输出能倒推出输入”。显然f(x)不一定能满足这个条件,所以首先要对它进行一下“包装处理”。
把原来的函数f(x),包装一个成量子计算里的可逆变换 \(U_{f}\) : \(U_{f} |x\rangle |y\rangle = |x\rangle |y \oplus f(x)\rangle\) 这里的 \(|x\rangle\) , \(|y\rangle\) 都是量子比特,“ \(\oplus\) ”是“异或”运算符。包装后的 \(U_{f}\) ,输入两个量子比特 \(|x\rangle\) , \(|y\rangle\) ,输出也是两个量子比特 \(|x\rangle\) , \(|y \oplus f(x)\rangle\) ,如下图所示:
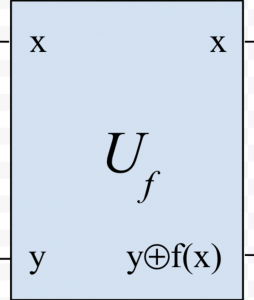
和原来的函数f(x)相比, \(U_{f}\) 多了一个“辅助输入”(ancillary),即 \(|y\rangle\) 。这个辅助输入的作用,很快我们就能看到。
前面说过,如果我们给H门一个 \(|1\rangle\) 输入,可以得到一个相干态(superposition)的量子比特: \(H|1\rangle = \frac{1}{\sqrt{2}}(|0\rangle-|1\rangle)\) ,这个状态通常又被记作 \(|-\rangle\)
有意思的事情来了,如果我们把这个状态 \(|-\rangle\) 作为辅助输入 \(|y\rangle\) 喂给 \(U_{f}\) ,会发生什么呢?
前面说过, \(U_{f} |x\rangle |y\rangle = |x\rangle |y \oplus f(x)\rangle\) ,代入 \(|y\rangle=|-\rangle=\frac{1}{\sqrt{2}}(|0\rangle-|1\rangle)\) ,我们可以得到:
\begin{matrix} U_{f}|x\rangle|y\rangle = |x\rangle\frac{1}{\sqrt{2}}(|0\oplus f(x)-1\oplus f(x)\rangle) = |x\rangle\frac{1}{\sqrt{2}}(|0\oplus f(x)\rangle-|1\oplus f(x)\rangle) \end{matrix}(这里利用了异或运算的分配律)
f(x)无非是0或者1:
- 如果f(x)=0,那么上面的结果就变成 $|x⟩\frac{1}{\sqrt{2}}(|0⊕0⟩-|1⊕ 0⟩) =
| x⟩\frac{1}{\sqrt{2}}( | 0⟩- | 1⟩)$ ,也就是 $ | x⟩ | -⟩$ |
- 如果f(x)=1,那么上面的结果就变成 $|x⟩\frac{1}{\sqrt{2}}(|0⊕1⟩-|1⊕ 1⟩) =
| x⟩\frac{1}{\sqrt{2}}( | 1⟩- | 0⟩)$ ,也就是 $- | x⟩ | -⟩$ |
把上面两种情况综合起来, \(U_{f}|x\rangle|-\rangle=(-1)^{f(x)}|x\rangle|-\rangle\) 。
看到没有?原先f(x)是在 \(|y\rangle\) 里的,现在跑到了输出端的正负号上: \((-1)^{f(x)}\) ,这个输出端的正负号,又称为“ 全局相位 ”。也就是说,如果我们给 \(U_{f}\) 喂一个辅助输入 \(|-\rangle\) ,就可以把把f(x)挪到输出端的“全局相位”(global phase)上!这是量子计算里一种常用的方法,叫做“phase kickback”。
但是全局相位本身是测量不出来的,这有什么用呢?别急,我们还有个输入 \(|x\rangle\) 没用呢!
现在考虑f(x)的四种可能情况: \(U_{f}|x\rangle|-\rangle=(-1)^{f(x)}|x\rangle|-\rangle\)
- \(f_0\) :即f(x)总是0,那么 $Uf|x⟩|-⟩=
| x⟩ | -⟩$ ,对输入 $ | x⟩$ 来说,相当于一个 \(I\) 变换 |
- \(f_1\) :即f(x)总是1,那么 $Uf|x⟩|-⟩=
-|x⟩|-⟩$ ,对输入 \(|x\rangle\) 来说,相当于一个 \(-I\) 变换
- \(f_x\) :即 \(f(x)=x\) ,那么 $Uf|x⟩|-⟩=
(-1)x |x⟩|-⟩$ ,还记得前面说的 \(Z\) 变换吗?对输入 \(|x\rangle\) 来说,这相当于一个 \(Z\) 变换,即 \(U_{f}|x\rangle|-\rangle= Z|x\rangle|-\rangle\)
- \(f_{\bar{x}}\) :即 \(f(x)=\bar{x}\) ,那么 $Uf|x⟩|-⟩=
(-1)-x |x⟩|-⟩ = -(-1)x |x⟩|-⟩$ ,对输入 \(|x\rangle\) 来说,这相当于一个 \(-Z\) 变换,即 \(U_{f}|x\rangle|-\rangle= -Z|x\rangle|-\rangle\)
再综合一下,经过 \(U_{f}|x\rangle|-\rangle\) 后, \(f_0\) 和 \(f_1\) (“常量”函数)分别变成了 \(I\) 和 \(-I\) ,而 \(f_x\) 和 \(f_{\bar{x}}\) (“平衡”函数)则分别变成了 \(Z\) 和 \(-Z\) !这正是我们想要区分的!
但是问题又来了:如何区分 \(I\) 和 \(Z\) 呢? \(Z\) 变换只改变相位,而正负相位经过测量后是区分不出来的,怎么办呢?
还记得前面提到的这两个公式吗?
\(HZH=X\) \(HIH=I\)
如果我们在 \(U_{f}|x\rangle|-\rangle\) 的两边,各放上一个H门,那么 \(f_0\) 和 \(f_1\) (“常量”函数)就会变成 \(\pmI\) ,而 \(f_x\) 和 \(f_{\bar{x}}\) (“平衡”函数)则会变成 \(\pm X\) 。 \(X\) 变换是干啥的?就是把 \(|0\rangle\) 变成 \(|1\rangle\) ,把 \(|1\rangle\) 变成 \(|0\rangle\) 啊!
到这一步,我们给 \(|x\rangle\) 输入 \(|0\rangle\) ,在输出端进行测量,会得到什么结果? 如果f(x)是“常量”函数( \(f_0\) 或 \(f_1\) ),那么对 \(|x\rangle\) 就是一个 \(\pmI\) 变换,在输出端测量,得到的仍然是 \(|0\rangle\) ; 如果f(x)是“平衡”函数( \(f_x\) 或 \(f_{\bar{x}}\) ),那么对 \(|x\rangle\) 就是一个 \(\pm X\) 变换,在输出端测量,我们会得到 \(|1\rangle\) !
最后我们得到的量子计算电路是这样的:
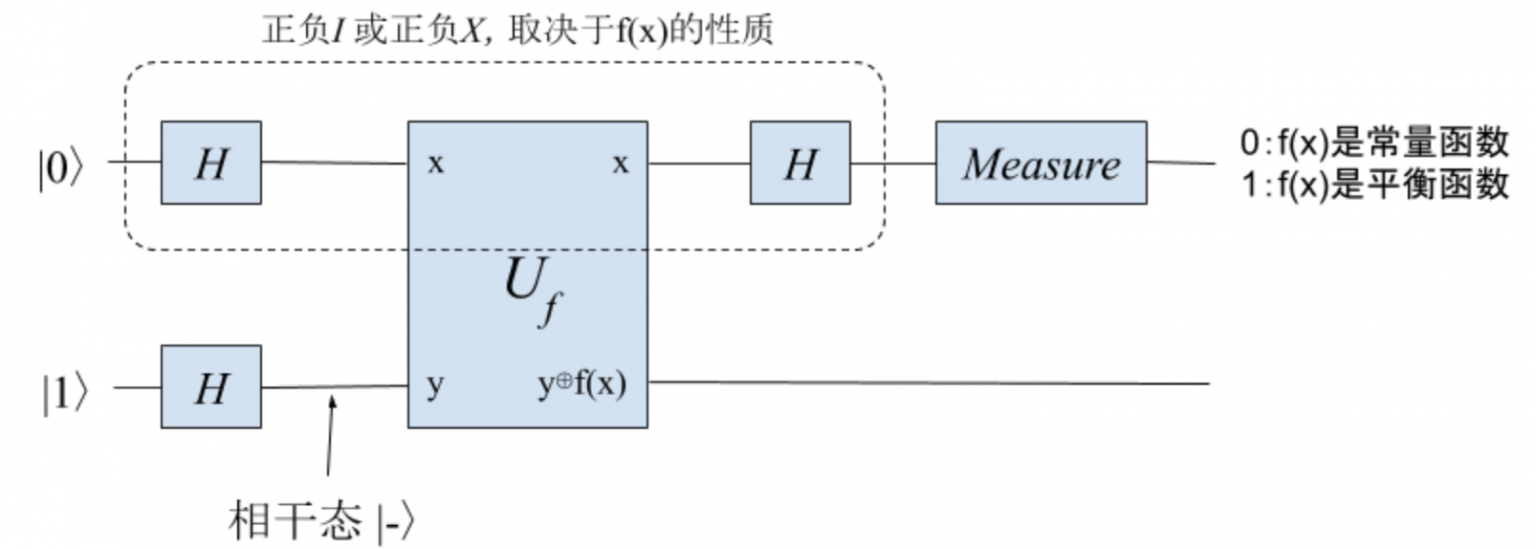
更重要的是,整个过程我们只对电路进行了 一次测量 ,也就是说, 对f(x)进行了一次“查询” ,我们就能知道f(x)是“常量”还是“平衡”的,而在经典计算机里,这个性质需要2次查询才能知道!
为什么会有这样的加速呢?我认为最关键的是通过输入相干态的 \(|y\rangle\) ,在 \(U_{f}\) 内部实际上实现了对所有可能状态的并行查询!
不要小看这里1次和2次的差别,这实质上体现了量子计算相对于经典计算的并行性,理论上可能会带来指数级的加速!
总结
当然,Deutsch问题本身没有太多实用价值,但它显示了在某些场景下量子计算机可以比经典计算机更快。理解Deutsch算法可以帮助我们更好的理解量子计算的内在并行性。至于有潜力实用化的量子计算算法,例如Grover搜索,Shor因式分解等,以后有空再说。